



AGRONAUTA. Agricultural robot for tomato harvesting
Innovation project for the automation of agronomic tasks in intensive farms using robotics.
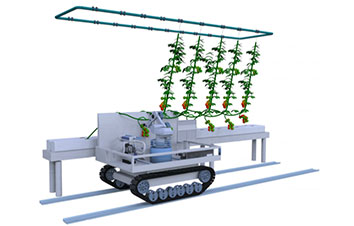
The Research Project AGRONAUTA (Automation of agronomic tasks in intensive farms through robotics), is an experimental development project whose challenge is to transform and revolutionize the production model of vine tomatoesthrough a global and multidisciplinary approach, which will allow the development of a cutting-edge and innovative technological solution: the harvesting and preparation of tomato bunches in situ (in the greenhouse) through a mobile robotic system, supported by an intelligent production environment.
The sum of the efforts of the consortium members will be directed to the development of a new transgressive production system, based on a mobile robot for use in the intensive cultivation of vine tomatoes, capable of performing tasks of intelligent analysis and harvesting, supported by a state-of-the-art automation and control environment that simplifies the productive work and accessibility of the robot, providing efficiency, cost reduction, development potential, flexibility and reliability of the system.
 In this sense, AGRONAUTA’s global goal is to develop a revolutionary prototype production system for intensive production under plastic.. this will mark a cutting-edge and innovative technological solution at international level, with the commitment to establish a clear advance and improvement, developing unique technologies and techniques for vegetable production, such as climate control, irrigation, automation, intelligence, artificial vision and robotization; with the aim of closing the production cycle, the system will be completed with the development of new packaging systems to be installed on the farm itself and a global management of production through management software and demand forecasting.
Novagric is part of this project, being in charge of the Tomato Trellising Systems, as well as the calculation and design of the Greenhouse Structure where the robot will be located. We will study the best option to facilitate the movements of the robot and facilitate tomato harvesting inside the greenhouse.
In this sense, AGRONAUTA’s global goal is to develop a revolutionary prototype production system for intensive production under plastic.. this will mark a cutting-edge and innovative technological solution at international level, with the commitment to establish a clear advance and improvement, developing unique technologies and techniques for vegetable production, such as climate control, irrigation, automation, intelligence, artificial vision and robotization; with the aim of closing the production cycle, the system will be completed with the development of new packaging systems to be installed on the farm itself and a global management of production through management software and demand forecasting.
Novagric is part of this project, being in charge of the Tomato Trellising Systems, as well as the calculation and design of the Greenhouse Structure where the robot will be located. We will study the best option to facilitate the movements of the robot and facilitate tomato harvesting inside the greenhouse.

 In this sense, AGRONAUTA’s global goal is to develop a revolutionary prototype production system for intensive production under plastic.. this will mark a cutting-edge and innovative technological solution at international level, with the commitment to establish a clear advance and improvement, developing unique technologies and techniques for vegetable production, such as climate control, irrigation, automation, intelligence, artificial vision and robotization; with the aim of closing the production cycle, the system will be completed with the development of new packaging systems to be installed on the farm itself and a global management of production through management software and demand forecasting.
Novagric is part of this project, being in charge of the Tomato Trellising Systems, as well as the calculation and design of the Greenhouse Structure where the robot will be located. We will study the best option to facilitate the movements of the robot and facilitate tomato harvesting inside the greenhouse.
In this sense, AGRONAUTA’s global goal is to develop a revolutionary prototype production system for intensive production under plastic.. this will mark a cutting-edge and innovative technological solution at international level, with the commitment to establish a clear advance and improvement, developing unique technologies and techniques for vegetable production, such as climate control, irrigation, automation, intelligence, artificial vision and robotization; with the aim of closing the production cycle, the system will be completed with the development of new packaging systems to be installed on the farm itself and a global management of production through management software and demand forecasting.
Novagric is part of this project, being in charge of the Tomato Trellising Systems, as well as the calculation and design of the Greenhouse Structure where the robot will be located. We will study the best option to facilitate the movements of the robot and facilitate tomato harvesting inside the greenhouse.
PARTNERS
- SERFRUIT, S.A. (Coordinador)
- TAUCON, S.A.
- Ingeniería de Aplicaciones, S.A.
- HISPATEC Informática Empresarial, S.A.U. Group.
- Novagric (Novedades Agrícolas, S.A.)
- Sistema AZUD, S.A.
- ULMA Packaging S.COOP.
- Tecnova Foundation
- University of Almeria
- Tecnalia Research & Innovation Foundation
- University of Girona
- CEBAS-CSIC
- ULMA Technological Center
- IK4-IKERLAN.
Financing
The development of this project will involve the mobilization of a private investment of more than 7 million euros, which will be co-financed by the European Regional Development Fund (ERDF) through the Multiregional Operational Program for Intelligent Growth (CIEN Strategic Program).
Related Posts


Categorías
Últimas novedades
- UCROP: New irrigation and climate control systems
- This Christmas, agriculture takes shape at Novagric
- HORT2THEFUTURE. Oxygen irrigation to improve soils
- HORT2THEFUTURE. Oxygen irrigation to improve soils
- GREENFOLD. Foldable and Reusable Greenhouses
- DARkWIN. Project to improve crops in the face of climate change
- +PreVENT. Positive pressure system for ecological greenhouses
- Novagric develops Solidarity Agricultural Projects
- Carbon Fertilisation Levels in Greenhouses
- How to control the climate during carbon fertilisation
 Company
Company
{kind=link}
{kind=link}
{kind=link}